生物力学模型示例¶
sympy.physics.biomechanics 提供功能来增强使用 sympy.physics.mechanics 创建的模型,其中包含模拟肌肉和肌腱的力产生元素。在本教程中,我们将通过向简单的人臂模型添加肌肉来介绍该包的功能,该模型用于移动杠杆。
模型描述¶

显示杠杆 \(A\) 和上臂 \(C\) 和下臂 \(D\) 的示意图。¶
杠杆 \(A\) 可以在 \(\hat{n}_z\) 绕轴旋转,旋转角度为 \(q_1\)。它的质心位于旋转轴上。肩部位于 \(P_2\),上臂 \(C\) 可以在 \(\hat{n}_y\) 绕轴伸展,伸展角度为 \(q_2\),并且可以在 \(\hat{b}_z\) 绕轴旋转,旋转角度为 \(q_3\)。肘部位于点 \(P_3\)。下臂可以在 \(\hat{c}_y\) 绕轴弯曲,弯曲角度为 \(q_4\)。手部位于点 \(P_4\)。为了将手部约束在杠杆上,需要强制执行 \(\mathbf{r}^{P_4/O} = \mathbf{r}^{P_1/O}\)。为了简化惯性,杠杆、上臂和下臂将被建模为细圆柱体。
我们将引入两个肌腱模型来代表肱二头肌和肱三头肌。两个肌肉附着点 \(C_m\) 和 \(D_m\) 分别固定在上臂和下臂上。肱二头肌将沿着从 \(C_m\) 到 \(D_m\) 的直线路径作用,在收缩时引起肘部屈曲。一个半径为 \(r\) 的圆弧被定义为以 \(P_3\) 为圆心,且垂直于 \(\hat{c}_y\)。肱三头肌将包裹在圆弧周围,并且也连接在与肱二头肌相同的点,在收缩时引起肘部伸展。
>>> import sympy as sm
>>> import sympy.physics.mechanics as me
>>> import sympy.physics.biomechanics as bm
定义变量¶
引入四个坐标 \(\mathbf{q} = [q_1, q_2, q_3, q_4]^T\),分别代表杠杆角度、肩部伸展、肩部旋转和肘部屈曲。我们还需要广义速度 \(\mathbf{u} = [u_1,u_2,u_3,u_4]^T\),我们将其定义为 \(\mathbf{u} = \dot{\mathbf{q}}\)。
>>> q1, q2, q3, q4 = me.dynamicsymbols('q1, q2, q3, q4', real=True)
>>> u1, u2, u3, u4 = me.dynamicsymbols('u1, u2, u3, u4', real=True)
机械系统所需的常数参数为
\(d_x, l_A\):分别沿 \(\hat{n}_x\) 和 \(\hat{a}_y\) 方向,定位 \(P_1\) 相对于 \(O\) 的位置
\(d_y, d_z\):分别沿单位向量方向 \(N\),定位 \(P_2\) 相对于 \(O\) 的位置
\(l_C,l_D\):上臂和下臂的长度
\(m_A,m_C,m_D\):杠杆、上臂和下臂的质量
\(g\):重力加速度
\(k\):杠杆线性旋转弹簧系数
\(c\):杠杆线性旋转阻尼系数
>>> dx, dy, dz = sm.symbols('dx, dy, dz', real=True, nonnegative=True)
>>> lA, lC, lD = sm.symbols('lA, lC, lD', real=True, positive=True)
>>> mA, mC, mD = sm.symbols('mA, mC, mD', real=True, positive=True)
>>> g, k, c, r = sm.symbols('g, k, c, r', real=True, positive=True)
定义运动学¶
定义图示显示杠杆 A 和上臂 C 和下臂 D。中显示的所有参考系和点。 \(C_o\) 和 \(D_o\) 分别是上臂和下臂的质心。
>>> N, A, B, C, D = sm.symbols('N, A, B, C, D', cls=me.ReferenceFrame)
>>> O, P1, P2, P3, P4 = sm.symbols('O, P1, P2, P3, P4 ', cls=me.Point)
>>> Ao, Co, Cm, Dm, Do = sm.symbols('Ao, Co, Cm, Dm, Do', cls=me.Point)
参考系的方位和角速度为
>>> A.orient_axis(N, q1, N.z)
>>> B.orient_axis(N, q2, N.y)
>>> C.orient_axis(B, q3, B.z)
>>> D.orient_axis(C, q4, C.y)
>>> A.set_ang_vel(N, u1*N.z)
>>> B.set_ang_vel(N, u2*N.y)
>>> C.set_ang_vel(B, u3*B.z)
>>> D.set_ang_vel(C, u4*C.y)
所有点的坐标和速度为
>>> Ao.set_pos(O, dx*N.x)
>>> P1.set_pos(Ao, lA*A.y)
>>> P2.set_pos(O, dy*N.y + dz*N.z)
>>> Co.set_pos(P2, lC/2*C.z)
>>> Cm.set_pos(P2, 1*lC/3*C.z)
>>> P3.set_pos(P2, lC*C.z)
>>> Dm.set_pos(P3, 1*lD/3*D.z)
>>> Do.set_pos(P3, lD/2*D.z)
>>> P4.set_pos(P3, lD*D.z)
>>> O.set_vel(N, 0)
>>> Ao.set_vel(N, 0)
>>> P1.v2pt_theory(Ao, N, A)
- lA*u1(t)*A.x
>>> P2.set_vel(N, 0)
>>> Co.v2pt_theory(P2, N, C)
lC*u2(t)*cos(q3(t))/2*C.x - lC*u2(t)*sin(q3(t))/2*C.y
>>> Cm.v2pt_theory(P2, N, C)
lC*u2(t)*cos(q3(t))/3*C.x - lC*u2(t)*sin(q3(t))/3*C.y
>>> P3.v2pt_theory(P2, N, C)
lC*u2(t)*cos(q3(t))*C.x - lC*u2(t)*sin(q3(t))*C.y
>>> Dm.v2pt_theory(P3, N, D)
lC*u2(t)*cos(q3(t))*C.x - lC*u2(t)*sin(q3(t))*C.y + lD*(u2(t)*cos(q3(t)) + u4(t))/3*D.x - lD*(u2(t)*sin(q3(t))*cos(q4(t)) - u3(t)*sin(q4(t)))/3*D.y
>>> Do.v2pt_theory(P3, N, D)
lC*u2(t)*cos(q3(t))*C.x - lC*u2(t)*sin(q3(t))*C.y + lD*(u2(t)*cos(q3(t)) + u4(t))/2*D.x - lD*(u2(t)*sin(q3(t))*cos(q4(t)) - u3(t)*sin(q4(t)))/2*D.y
>>> P4.v2pt_theory(P3, N, D)
lC*u2(t)*cos(q3(t))*C.x - lC*u2(t)*sin(q3(t))*C.y + lD*(u2(t)*cos(q3(t)) + u4(t))*D.x - lD*(u2(t)*sin(q3(t))*cos(q4(t)) - u3(t)*sin(q4(t)))*D.y
需要三个完整约束方程来保持手部 \(P_4\) 在杠杆 \(P_1\) 上
>>> holonomic = (P4.pos_from(O) - P1.pos_from(O)).to_matrix(N)
定义惯性¶
假设杠杆、上臂和下臂是细圆柱体,可以形成惯性二元组和刚体
>>> IA = me.Inertia(me.inertia(A, mA/12*lA**2, mA/2*lA**2, mA/12*lA**2), Ao)
>>> IC = me.Inertia(me.inertia(C, mC/12*lC**2, mC/12*lC**2, mC/2*lC**2), Co)
>>> ID = me.Inertia(me.inertia(D, mD/12*lD**2, mD/12*lD**2, mD/2*lD**2), Do)
>>> lever = me.RigidBody('lever', masscenter=Ao, frame=A, mass=mA, inertia=IA)
>>> u_arm = me.RigidBody('upper arm', masscenter=Co, frame=C, mass=mC, inertia=IC)
>>> l_arm = me.RigidBody('lower arm', masscenter=Do, frame=D, mass=mD, inertia=ID)
定义力¶
我们将在地球的重力场中模拟这个系统
>>> gravC = me.Force(u_arm, mC*g*N.z)
>>> gravD = me.Force(l_arm, mD*g*N.z)
杠杆具有惯性,但我们还将添加一个线性扭转弹簧和阻尼器,为手臂提供更大的阻力以抵消和拉动
>>> lever_resistance = me.Torque(A, (-k*q1 - c*u1)*N.z)
肱二头肌¶
我们将肱二头肌建模为一个执行器,它在两个肌肉附着点 \(C_m\) 和 \(D_m\) 之间收缩。该肌肉可以根据指定的输入激励收缩,并且我们假设相关的肌腱是刚性的。肌腱执行器模型将由两个部分组成:一个作用的路径和激活动力学,它定义了输入激励如何传播到激活肌肉。肱二头肌将沿着 LinearPathway 作用,并将使用从 [DeGroote2016] 推导出的特定肌肉动力学实现。
首先创建线性路径
>>> biceps_pathway = me.LinearPathway(Cm, Dm)
您可以创建一个完全符号化的激活模型,或者使用从 [DeGroote2016] 中获得的特定调整后的数值参数来创建(推荐)
>>> biceps_activation = bm.FirstOrderActivationDeGroote2016.with_defaults('biceps')
然后使用匹配的类命名和构建完整的肌腱执行器模型
>>> biceps = bm.MusculotendonDeGroote2016.with_defaults('biceps', biceps_pathway, biceps_activation)
肱三头肌¶
肱三头肌执行器模型需要一个自定义路径来管理肌肉和肌腱围绕半径为 \(r\) 的圆弧的缠绕性质。这条路径由两段长度不变的直线段和一段长度随肘部伸展和弯曲而变化的圆弧组成。作用在上臂和下臂上的力可以建模为作用在点 \(C_m\) 和 \(D_m\) 上的力,这些力始终平行于路径的直线部分,以及来自作用在圆弧两端的点上的大小相等且方向相反的力,作用在 \(P_3\) 上的合力。
为了开发这条路径,我们需要继承 PathwayBase 并创建计算路径长度、路径伸展速度和作用在相关物体上的载荷的方法。我们将开发一个类,该类假设两个刚体之间有一个销钉关节,两个肌肉附着点分别固定在每个物体上,并且销钉关节点和两个附着点位于与销钉关节轴垂直的同一平面内。我们还将假设销钉关节坐标的测量方式与 图示显示杠杆 A 和上臂 C 和下臂 D。 中的 \(q_4\) 相同,并且 \(0 \le q_4 \le \pi\)。圆弧的半径为 \(r\)。有了这些假设,我们就可以使用 __init__() 方法收集必要的信息,以便在其余方法中使用。在 __init__() 中,我们还将计算一些在多个重载方法中都需要用到的量。路径的长度是两段直线段和圆弧长度的总和,圆弧长度随销钉关节坐标的变化而变化。伸展速度仅仅是弧长随时间的变化率。载荷由三个力组成:两个力沿着路径的直线部分推拉起点和插入点,以及来自推拉圆弧两端的力对肘部的合力影响。
>>> class ExtensorPathway(me.PathwayBase):
...
... def __init__(self, origin, insertion, axis_point, axis, parent_axis,
... child_axis, radius, coordinate):
... """A custom pathway that wraps a circular arc around a pin joint.
...
... This is intended to be used for extensor muscles. For example, a
... triceps wrapping around the elbow joint to extend the upper arm at
... the elbow.
...
... Parameters
... ==========
... origin : Point
... Muscle origin point fixed on the parent body (A).
... insertion : Point
... Muscle insertion point fixed on the child body (B).
... axis_point : Point
... Pin joint location fixed in both the parent and child.
... axis : Vector
... Pin joint rotation axis.
... parent_axis : Vector
... Axis fixed in the parent frame (A) that is directed from the pin
... joint point to the muscle origin point.
... child_axis : Vector
... Axis fixed in the child frame (B) that is directed from the pin
... joint point to the muscle insertion point.
... radius : sympyfiable
... Radius of the arc that the muscle wraps around.
... coordinate : sympfiable function of time
... Joint angle, zero when parent and child frames align. Positive
... rotation about the pin joint axis, B with respect to A.
...
... Notes
... =====
...
... Only valid for coordinate >= 0.
...
... """
... super().__init__(origin, insertion)
...
... self.origin = origin
... self.insertion = insertion
... self.axis_point = axis_point
... self.axis = axis.normalize()
... self.parent_axis = parent_axis.normalize()
... self.child_axis = child_axis.normalize()
... self.radius = radius
... self.coordinate = coordinate
...
... self.origin_distance = axis_point.pos_from(origin).magnitude()
... self.insertion_distance = axis_point.pos_from(insertion).magnitude()
... self.origin_angle = sm.asin(self.radius/self.origin_distance)
... self.insertion_angle = sm.asin(self.radius/self.insertion_distance)
...
... @property
... def length(self):
... """Length of the pathway.
...
... Length of two fixed length line segments and a changing arc length
... of a circle.
...
... """
...
... angle = self.origin_angle + self.coordinate + self.insertion_angle
... arc_length = self.radius*angle
...
... origin_segment_length = self.origin_distance*sm.cos(self.origin_angle)
... insertion_segment_length = self.insertion_distance*sm.cos(self.insertion_angle)
...
... return origin_segment_length + arc_length + insertion_segment_length
...
... @property
... def extension_velocity(self):
... """Extension velocity of the pathway.
...
... Arc length of circle is the only thing that changes when the elbow
... flexes and extends.
...
... """
... return self.radius*self.coordinate.diff(me.dynamicsymbols._t)
...
... def to_loads(self, force_magnitude):
... """Loads in the correct format to be supplied to `KanesMethod`.
...
... Forces applied to origin, insertion, and P from the muscle wrapped
... over circular arc of radius r.
...
... """
...
... parent_tangency_point = me.Point('Aw') # fixed in parent
... child_tangency_point = me.Point('Bw') # fixed in child
...
... parent_tangency_point.set_pos(
... self.axis_point,
... -self.radius*sm.cos(self.origin_angle)*self.parent_axis.cross(self.axis)
... + self.radius*sm.sin(self.origin_angle)*self.parent_axis,
... )
... child_tangency_point.set_pos(
... self.axis_point,
... self.radius*sm.cos(self.insertion_angle)*self.child_axis.cross(self.axis)
... + self.radius*sm.sin(self.insertion_angle)*self.child_axis),
...
... parent_force_direction_vector = self.origin.pos_from(parent_tangency_point)
... child_force_direction_vector = self.insertion.pos_from(child_tangency_point)
... force_on_parent = force_magnitude*parent_force_direction_vector.normalize()
... force_on_child = force_magnitude*child_force_direction_vector.normalize()
... loads = [
... me.Force(self.origin, force_on_parent),
... me.Force(self.axis_point, -(force_on_parent + force_on_child)),
... me.Force(self.insertion, force_on_child),
... ]
... return loads
...
现在我们已经定义了自定义路径,我们可以像创建肱二头肌一样创建肌腱执行器模型
>>> triceps_pathway = ExtensorPathway(Cm, Dm, P3, B.y, -C.z, D.z, r, q4)
>>> triceps_activation = bm.FirstOrderActivationDeGroote2016.with_defaults('triceps')
>>> triceps = bm.MusculotendonDeGroote2016.with_defaults('triceps', triceps_pathway, triceps_activation)
最后,所有载荷都可以组合成一个列表
>>> loads = biceps.to_loads() + triceps.to_loads() + [lever_resistance, gravC, gravD]
运动方程¶
现在所有载荷都已经定义,就可以生成系统的运动方程。我们有三个完整约束,因此系统只有一个自由度。
>>> kane = me.KanesMethod(
... N,
... (q1,),
... (u1,),
... kd_eqs=(
... u1 - q1.diff(),
... u2 - q2.diff(),
... u3 - q3.diff(),
... u4 - q4.diff(),
... ),
... q_dependent=(q2, q3, q4),
... configuration_constraints=holonomic,
... velocity_constraints=holonomic.diff(me.dynamicsymbols._t),
... u_dependent=(u2, u3, u4),
... )
...
>>> Fr, Frs = kane.kanes_equations((lever, u_arm, l_arm), loads)
非线性 \(\dot{\mathbf{u}}\) 的项包含肌肉力,这些力是除了坐标和广义速度之外的激活状态变量的函数。
>>> me.find_dynamicsymbols(kane.forcing)
{a_biceps(t), a_triceps(t), q1(t), q2(t), q3(t), q4(t), u1(t), u2(t), u3(t), u4(t)}
它们还包含与肌肉模型相关的新的常数参数
>>> kane.forcing.free_symbols
{F_M_max_biceps, F_M_max_triceps, c, g, k, lA, lC, lD, l_M_opt_biceps, l_M_opt_triceps, l_T_slack_biceps, l_T_slack_triceps, mC, mD, r, t}
肌肉激活微分方程¶
每块肌肉的激活状态是与两个新的二阶微分方程相关的新的状态变量。这些微分方程可以从肌肉执行器模型中访问
>>> biceps.rhs()
Matrix([[((1/2 - tanh(10.0*a_biceps(t) - 10.0*e_biceps(t))/2)/(0.0225*a_biceps(t) + 0.0075) + 16.6666666666667*(3*a_biceps(t)/2 + 1/2)*(tanh(10.0*a_biceps(t) - 10.0*e_biceps(t))/2 + 1/2))*(-a_biceps(t) + e_biceps(t))]])
>>> triceps.rhs()
Matrix([[((1/2 - tanh(10.0*a_triceps(t) - 10.0*e_triceps(t))/2)/(0.0225*a_triceps(t) + 0.0075) + 16.6666666666667*(3*a_triceps(t)/2 + 1/2)*(tanh(10.0*a_triceps(t) - 10.0*e_triceps(t))/2 + 1/2))*(-a_triceps(t) + e_triceps(t))]])
将肌肉激活微分方程存储在一个矩阵中
>>> dadt = biceps.rhs().col_join(triceps.rhs())
评估系统微分方程¶
这个系统的完整微分方程组形式为
在本例中,只有动力学微分方程需要求解线性系统才能转换为显式形式。
为了评估系统的方程,我们首先需要收集所有状态、输入和常数变量,以便与 lambdify 一起使用。状态向量由坐标、广义速度和两块肌肉的激活状态组成:\(\mathbf{x}=\begin{bmatrix}\mathbf{q}\\\mathbf{u}\\\mathbf{a}\end{bmatrix}\)。
>>> q, u = kane.q, kane.u
>>> a = biceps.x.col_join(triceps.x)
>>> x = q.col_join(u).col_join(a)
>>> x
Matrix([
[ q1(t)],
[ q2(t)],
[ q3(t)],
[ q4(t)],
[ u1(t)],
[ u2(t)],
[ u3(t)],
[ u4(t)],
[ a_biceps(t)],
[a_triceps(t)]])
唯一的指定输入是两块肌肉的激励
>>> e = biceps.r.col_join(triceps.r)
>>> e
Matrix([
[ e_biceps(t)],
[e_triceps(t)]])
常数由几何形状、质量、局部重力常数、杠杆的刚度和阻尼系数以及肌肉的各种参数组成。
>>> p = sm.Matrix([
... dx,
... dy,
... dz,
... lA,
... lC,
... lD,
... mA,
... mC,
... mD,
... g,
... k,
... c,
... r,
... biceps.F_M_max,
... biceps.l_M_opt,
... biceps.l_T_slack,
... triceps.F_M_max,
... triceps.l_M_opt,
... triceps.l_T_slack,
... ])
...
>>> p
Matrix([
[ dx],
[ dy],
[ dz],
[ lA],
[ lC],
[ lD],
[ mA],
[ mC],
[ mD],
[ g],
[ k],
[ c],
[ r],
[ F_M_max_biceps],
[ l_M_opt_biceps],
[ l_T_slack_biceps],
[ F_M_max_triceps],
[ l_M_opt_triceps],
[l_T_slack_triceps]])
现在我们有了所有符号组件,可以生成数值函数来评估 \(\mathbf{M}_d,\mathbf{g}_d\) 和 \(\mathbf{g}_a\)。有了这些,我们就可以计算状态的时间导数。我们还需要一个用于完整约束的数值函数,以确保配置处于有效状态。
>>> eval_diffeq = sm.lambdify((q, u, a, e, p),
... (kane.mass_matrix, kane.forcing, dadt), cse=True)
>>> eval_holonomic = sm.lambdify((q, p), holonomic, cse=True)
我们需要为所有常数指定一些合理的数值
>>> import numpy as np
>>> p_vals = np.array([
... 0.31, # dx [m]
... 0.15, # dy [m]
... -0.31, # dz [m]
... 0.2, # lA [m]
... 0.3, # lC [m]
... 0.3, # lD [m]
... 1.0, # mA [kg]
... 2.3, # mC [kg]
... 1.7, # mD [kg]
... 9.81, # g [m/s/s]
... 5.0, # k [Nm/rad]
... 0.5, # c [Nms/rad]
... 0.03, # r [m]
... 500.0, # biceps F_M_max [?]
... 0.6*0.3, # biceps l_M_opt [?]
... 0.55*0.3, # biceps l_T_slack [?]
... 500.0, # triceps F_M_max [?]
... 0.6*0.3, # triceps l_M_opt [?]
... 0.65*0.3, # triceps l_T_slack [?]
... ])
...
由于有三个完整约束,因此三个坐标是其余一个坐标的函数。我们可以选择杠杆角度 \(q_1\) 作为独立坐标,并根据其值的估计值求解其余坐标。
>>> from scipy.optimize import fsolve
>>> q_vals = np.array([
... np.deg2rad(5.0), # q1 [rad]
... np.deg2rad(-10.0), # q2 [rad]
... np.deg2rad(0.0), # q3 [rad]
... np.deg2rad(75.0), # q4 [rad]
... ])
...
>>> def eval_holo_fsolve(x):
... q1 = q_vals[0] # specified
... q2, q3, q4 = x
... return eval_holonomic((q1, q2, q3, q4), p_vals).squeeze()
...
>>> q_vals[1:] = fsolve(eval_holo_fsolve, q_vals[1:])
>>> np.rad2deg(q_vals)
[ 5. -0.60986636 9.44918589 88.68812842]
我们假设系统处于初始静止状态
>>> u_vals = np.array([
... 0.0, # u1, [rad/s]
... 0.0, # u2, [rad/s]
... 0.0, # u3, [rad/s]
... 0.0, # u4, [rad/s]
... ])
...
>>> a_vals = np.array([
... 0.0, # a_bicep, nondimensional
... 0.0, # a_tricep, nondimensional
... ])
肌肉激励最初也将处于非激活状态
>>> e_vals = np.array([
... 0.0,
... 0.0,
... ])
现在可以数值评估系统方程
>>> eval_diffeq(q_vals, u_vals, a_vals, e_vals, p_vals)
([[ 0.00333333 -0.15174161 -0.00109772 -0.00152436]
[ 0.19923894 0.31 -0.04923615 0.00996712]
[ 0.01743115 0. 0.29585191 0.0011276 ]
[ 0. -0.29256885 -0.0005241 -0.29983226]], [[-0.9121071]
[ 0. ]
[-0. ]
[ 0. ]], [[0.]
[0.]])
模拟肌肉驱动的运动¶
现在,给定状态和常数值,系统方程可以被求解,我们可以模拟手臂和杠杆在两种肌肉激励下的运动。SciPy 的 solve_ivp() 可以对微分方程进行积分,前提是我们提供一个以显式形式求解它们的函数,即 \(\dot{\mathbf{x}}=\)。我们将包含一个激励肌肉的函数,但将其设置为第一个模拟的零值。
>>> def eval_r(t):
... """Returns the muscles' excitation as a function of time."""
... e = np.array([0.0, 0.0])
... return e
...
>>> def eval_rhs(t, x, r, p):
... """Returns the time derivative of the state.
...
... Parameters
... ==========
... t : float
... Time in seconds.
... x : array_like, shape(10,)
... State vector.
... r : function
... Function f(t) that evaluates e.
... p : array_like, shape(?, )
... Parameter vector.
...
... Returns
... =======
... dxdt : ndarray, shape(10,)
... Time derivative of the state.
...
... """
...
... q = x[0:4]
... u = x[4:8]
... a = x[8:10]
...
... e = r(t)
...
... qd = u
... m, f, ad = eval_diffeq(q, u, a, e, p)
... ud = np.linalg.solve(m, f).squeeze()
...
... return np.hstack((qd, ud, ad.squeeze()))
...
现在,给定初始状态 \(\mathbf{x}_0\) 和我们上面定义的函数,可以使用 SciPy 的 solve_ivp() 对系统进行 3 秒的模拟。
>>> from scipy.integrate import solve_ivp
>>> t0, tf = 0.0, 3.0
>>> ts = np.linspace(t0, tf, num=301)
>>> x0 = np.hstack((q_vals, u_vals, a_vals))
>>> sol = solve_ivp(lambda t, x: eval_rhs(t, x, eval_r, p_vals),
... (t0, tf), x0, t_eval=ts)
可以通过绘制状态轨迹随时间的变化来可视化运动。
>>> import matplotlib.pyplot as plt
>>> def plot_traj(t, x, syms):
... """Simple plot of state trajectories.
...
... Parameters
... ==========
... t : array_like, shape(n,)
... Time values.
... x : array_like, shape(n, m)
... State values at each time value.
... syms : sequence of Symbol, len(m)
... SymPy symbols associated with state.
...
... """
...
... fig, axes = plt.subplots(5, 2, sharex=True)
...
... for ax, traj, sym in zip(axes.T.flatten(), x.T, syms):
... if not sym.name.startswith('a'):
... traj = np.rad2deg(traj)
... ax.plot(t, traj)
... ax.set_ylabel(sm.latex(sym, mode='inline'))
...
... for ax in axes[-1, :]:
... ax.set_xlabel('Time [s]')
...
... fig.tight_layout()
...
... return axes
...
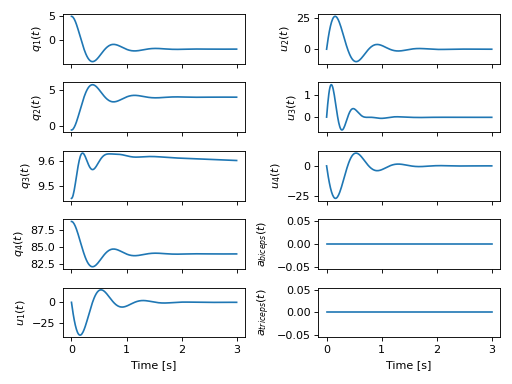
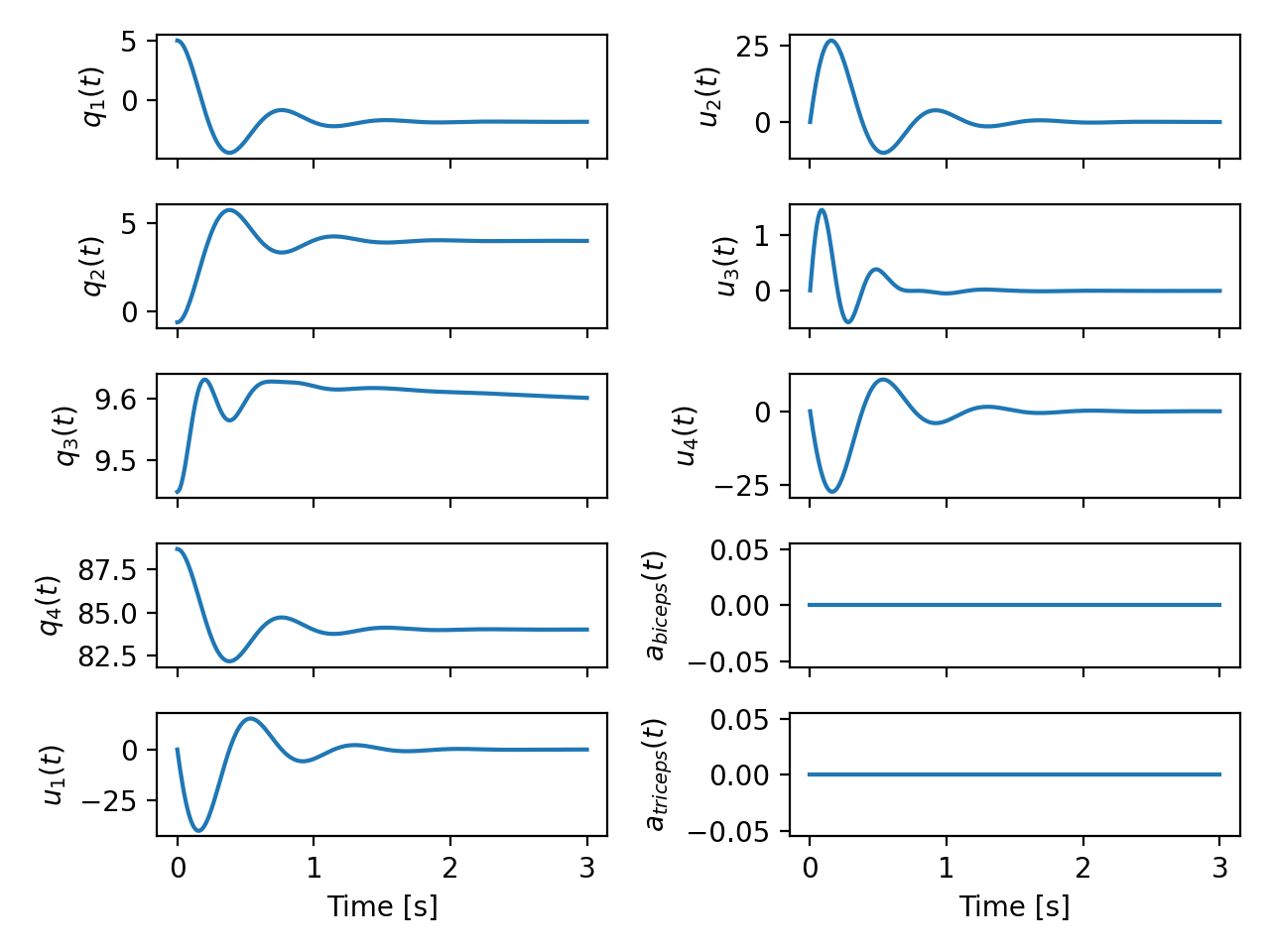
>>> plot_traj(ts, sol.y.T, x)
[[<Axes: ylabel='$q_{1}{\\left(t \\right)}$'>
<Axes: ylabel='$u_{2}{\\left(t \\right)}$'>]
[<Axes: ylabel='$q_{2}{\\left(t \\right)}$'>
<Axes: ylabel='$u_{3}{\\left(t \\right)}$'>]
[<Axes: ylabel='$q_{3}{\\left(t \\right)}$'>
<Axes: ylabel='$u_{4}{\\left(t \\right)}$'>]
[<Axes: ylabel='$q_{4}{\\left(t \\right)}$'>
<Axes: ylabel='$a_{biceps}{\\left(t \\right)}$'>]
[<Axes: xlabel='Time [s]', ylabel='$u_{1}{\\left(t \\right)}$'>
<Axes: xlabel='Time [s]', ylabel='$a_{triceps}{\\left(t \\right)}$'>]]
{kind=link}
{kind=link}
模拟手臂,初始杠杆角度为 5 度,在没有肌肉激活的情况下稳定到平衡位置。¶
模拟表明,手臂在重力、杠杆阻力和肌肉肌腱模型的被动方面作用下,稳定到平衡状态。现在,我们以 80% 的激励激活肱二头肌 1 秒,观察其对运动的影响。
>>> def eval_r(t):
... if t < 0.5 or t > 1.5:
... e = np.array([0.0, 0.0])
... else:
... e = np.array([0.8, 0.0])
... return e
...
>>> sol = solve_ivp(lambda t, x: eval_rhs(t, x, eval_r, p_vals), (t0, tf), x0, t_eval=ts)
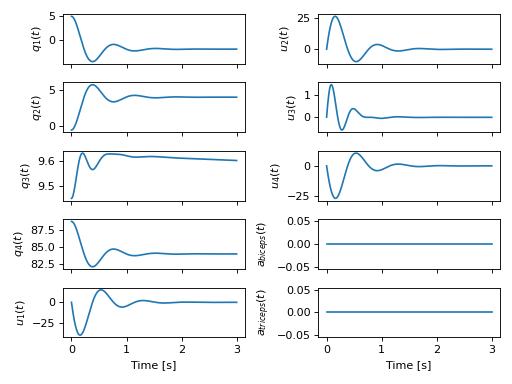
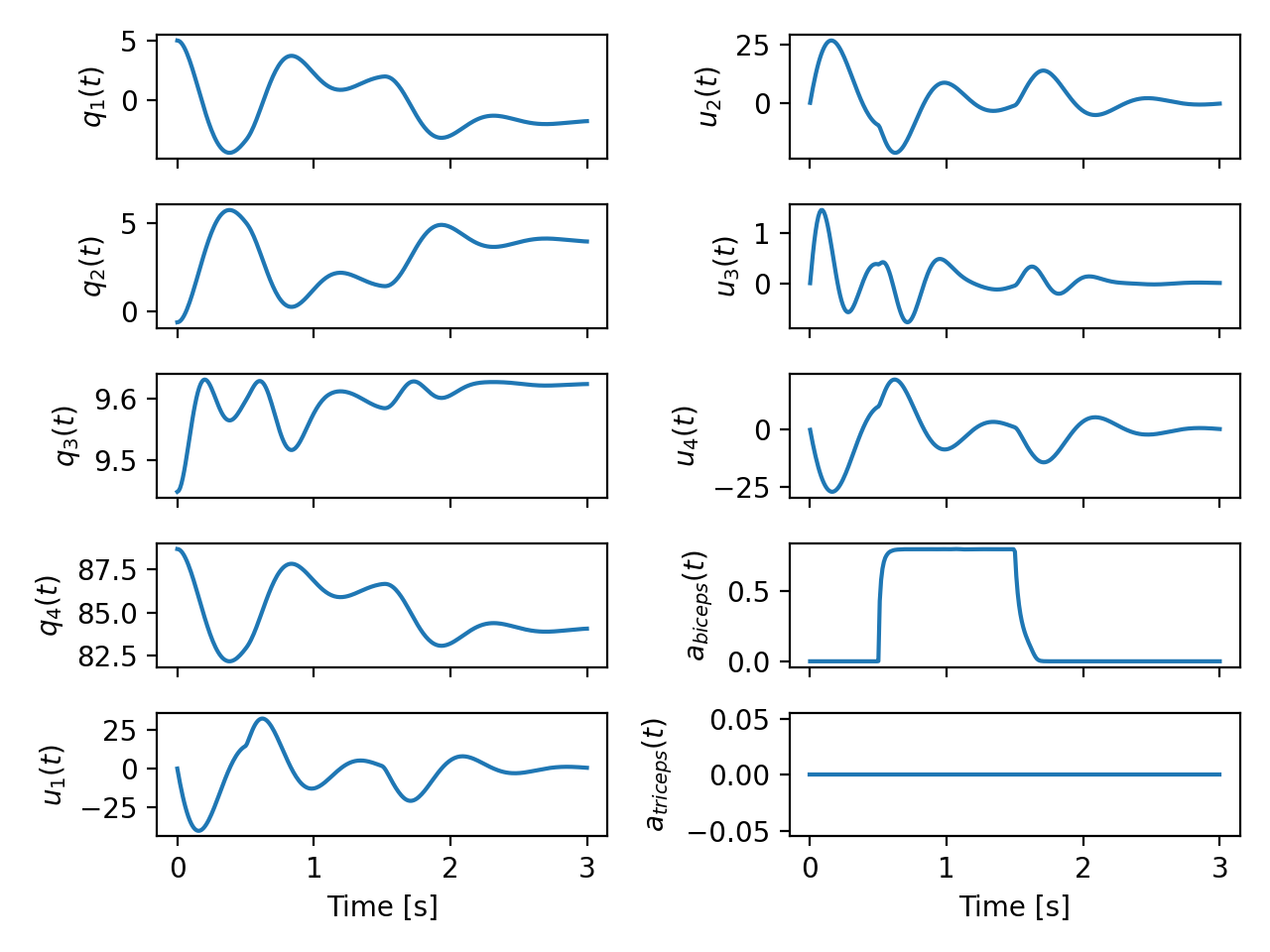
>>> plot_traj(ts, sol.y.T, x)
[[<Axes: ylabel='$q_{1}{\\left(t \\right)}$'>
<Axes: ylabel='$u_{2}{\\left(t \\right)}$'>]
[<Axes: ylabel='$q_{2}{\\left(t \\right)}$'>
<Axes: ylabel='$u_{3}{\\left(t \\right)}$'>]
[<Axes: ylabel='$q_{3}{\\left(t \\right)}$'>
<Axes: ylabel='$u_{4}{\\left(t \\right)}$'>]
[<Axes: ylabel='$q_{4}{\\left(t \\right)}$'>
<Axes: ylabel='$a_{biceps}{\\left(t \\right)}$'>]
[<Axes: xlabel='Time [s]', ylabel='$u_{1}{\\left(t \\right)}$'>
<Axes: xlabel='Time [s]', ylabel='$a_{triceps}{\\left(t \\right)}$'>]]
{kind=link}
{kind=link}
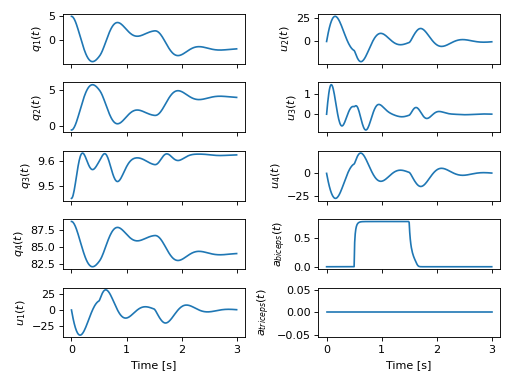
模拟手臂,初始杠杆角度为 5 度,在肱二头肌收缩 1 秒的影响下。¶
我们首先看到,手臂尝试像以前一样稳定到平衡状态,但随后被激活的肱二头肌将杠杆拉回肩膀,导致手臂对抗被动运动。肌肉失活后,手臂像以前一样稳定下来。
结论¶
在这里,我们展示了如何通过构建一个简单且自定义的肌肉肌腱驱动路径来创建代表肌肉骨骼系统的数学模型。该模型的运动可以通过激励肌肉来控制,模拟显示出预期的行为。